|
|
|
|
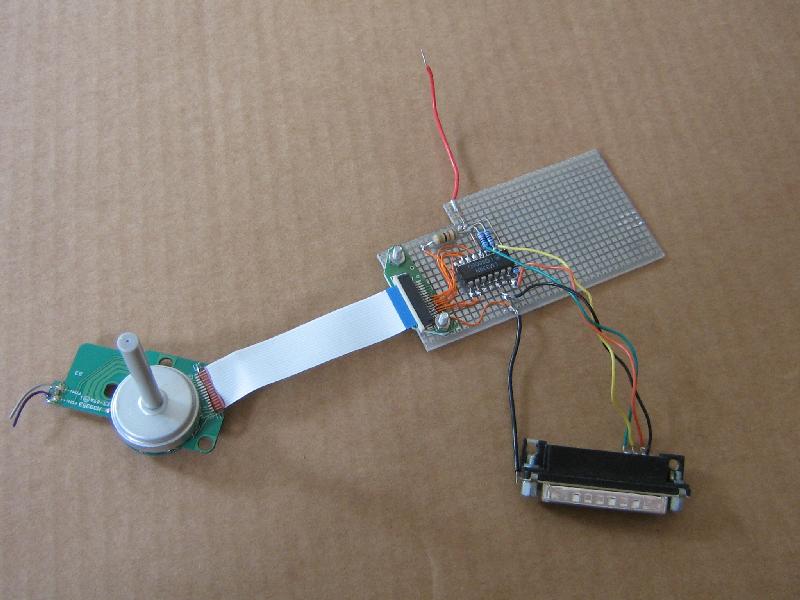
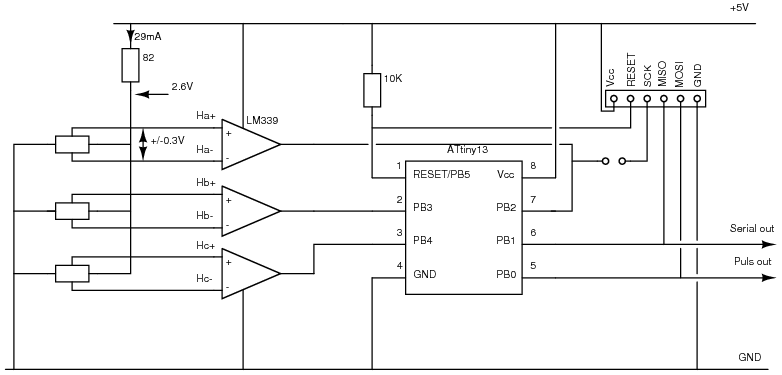
small power supply and programmer |
|
|
|
|
|
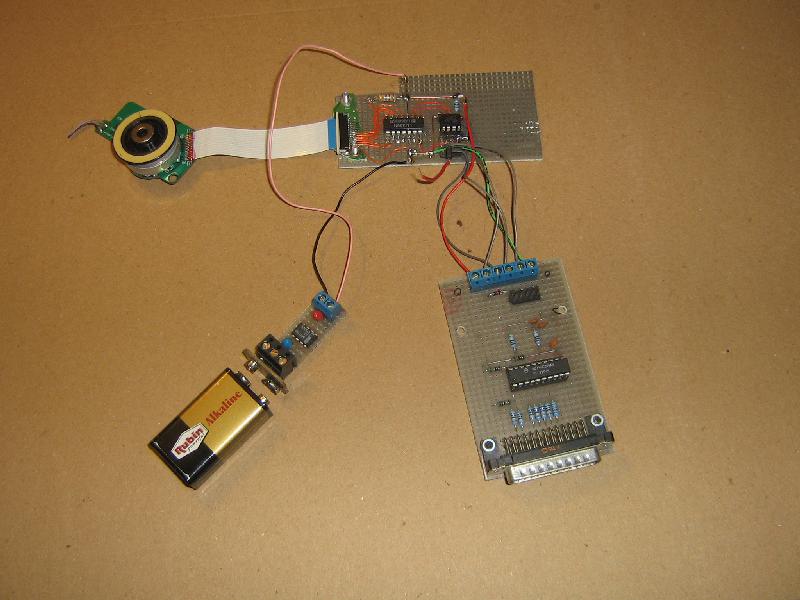
small power supply and programmer |
avrdude -v -P /dev/ppi0 -c stk200 -p t13 -U lfuse:w:0x7a:mThis has to be done only once.
avrdude -v -P /dev/ppi0 -c stk200 -p t13 -U flash:w:oenc.bin:r